机器人安全地在飞行中四处移动
实时机器人(Realtime Robotics)创建了一个控制器,可帮助机器人安全地在飞行中四处移动。
乔治·科尼达里斯(George Konidaris)仍然记得他对机器人技术的沮丧介绍。
他说:“当你还是一个年轻的学生并且想对机器人进行编程时,首先遇到的是对你无法使用该机器人做很多事情的巨大失望。”
大多数新的机器人专家都希望对他们的机器人进行编程,以解决有趣的,复杂的任务-但是事实证明,仅在空间中移动它们而不会与物体发生碰撞比听起来要难得多。
幸运的是,Konidaris希望未来的机器人专家在该领域能有一个更加令人兴奋的起点。那是因为大约四年前,他与人共同创立了Realtime Robotics,这是一家致力于解决机器人“运动计划问题”的创业公司。
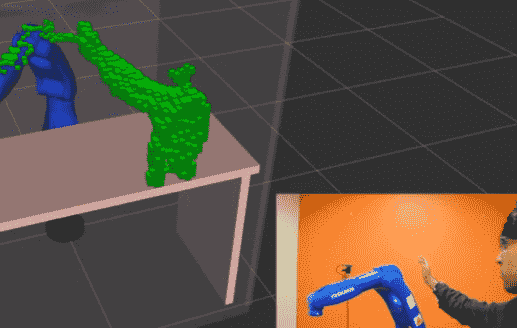
该公司发明了一种解决方案,该解决方案使机器人能够快速调整其路径,以避开物体移动到目标的过程。实时控制器是一个盒子,可以连接到各种机器人并部署在动态环境中。
“我们的盒子只是根据客户的程序运行机器人,”目前担任Realtime首席机器人专家的Konidaris解释说。“它负责移动,机器人的速度,检测障碍物和碰撞检测。[我们的客户]只需要说:“我希望这个机器人移到这里。”
Realtime的关键启用技术是独特的电路设计,当与专有软件结合使用时,可为机器人提供插入式电机皮质功能。除了帮助满足满天星斗的机器人专家的期望之外,该技术还代表着朝着可以在不断变化的环境中有效工作的机器人的根本前进。
帮助机器人四处走走
Konidaris并不是第一个因机器人技术中的运动计划问题而灰心的人。该领域的研究人员对此进行了40年的研究。在麻省理工学院四年的博士后期间,科尼达里斯与工程学院教授卓越教学工作一起工作。托马斯·洛萨诺·佩雷斯是该领域的先驱,他在科尼达里斯出生之前就发表了有关运动计划的论文。
人类认为避免碰撞是理所当然的。Konidaris指出,从冰箱中拿啤酒的简单动作实际上需要执行一系列任务,例如打开冰箱,将您的身体伸进去,避开冰箱中的其他物体以及决定在哪里拿啤酒罐。
Konidaris说:“实际上,您需要计算多个计划。” “您可能需要计算数百个计划才能采取所需的行动。……奇怪的是,人类每天要做数百次最简单的事情实际上需要进行大量计算。”
在机器人技术中,运动计划问题围绕着机器人在太空中移动进行频繁测试所需的计算能力。在计划路径的每个阶段,这些测试有助于确定各种微小的运动是否会使机器人与周围的物体碰撞。这样的测试激发了研究人员近年来思考越来越复杂的算法,但Konidaris认为这是错误的方法。
Konidaris说:“人们正在尝试使算法更智能,更复杂,但这通常表明您走错了路。” “实际上,超级技术先进的技术解决诸如此类的问题并不普遍。”
Konidaris于2014年离开麻省理工学院加入杜克大学,但他继续与麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员合作。Konidaris还是Duke与Realtime联合创始人Sean Murray,Dan Sorin和Will Floyd-Jones会面的地方。在2015年,联合创始人合作制造了一种新型计算机芯片,其电路专门设计用于执行频繁碰撞测试,以使机器人安全地穿越太空。定制电路可以并行执行操作,以更有效地测试短运动碰撞。
Konidaris说:“当我离开麻省理工学院去杜克大学时,令我烦恼的是,现在应该真正解决这个运动计划问题。” “这确实的确来自MIT的许多经验。在进入麻省理工学院之前,我将无法撰写有关运动计划的论文。”
研究人员于2016年创立了Realtime,并迅速聘请了机器人行业的资深人士Peter Howard MBA '87,他目前担任Realtime的首席执行官,也被认为是联合创始人。
“我想在波士顿成立这家公司,因为我知道麻省理工学院,并且在那里开展了许多机器人工作,” 2016年移居布朗大学的Konidaris说。“波士顿是机器人技术的枢纽。这里有大量的本地人才,我认为很多是因为MIT在这里-MIT的博士学位成为了当地学校的老师,而那些人开始了机器人程序。这种网络效应非常强。”
卸下机器人约束
如今,大多数Realtime的客户都在汽车,制造和物流行业。使用Realtime解决方案的机器人可以完成所有工作,从点焊到进行检查再到从垃圾箱中拾取物品。
客户购买Realtime的控制箱后,他们会加载一个文件,该文件描述机器人的工作单元的配置,有关机器人的信息(例如其臂端工具)以及机器人正在完成的任务。实时还可帮助将机器人及其随附的传感器最佳地放置在工作区域周围。Konidaris说,实时可以将部署机器人的过程从平均15周缩短到一周。
机器人启动并运行后,Realtime的盒子将控制其运动,从而使其具有即时防撞功能。
“您可以将其用于任何机器人,” Konidaris说。“您告诉它需要去的地方,其余的我们将处理。”
实时是麻省理工学院工业联络计划(ILP)的一部分,该计划可帮助公司与更大的工业合作伙伴建立联系,并且最近加入了ILP的STEX25启动加速器。
由于计划在接下来的几个月中进行一些大规模部署,因此,实时团队的动力来自于这样的信念:解决运动规划这样的根本问题将为机器人领域解锁许多新应用程序。
Konidaris说:“我对Realtime感到最激动的是,我们是一家真正的技术公司。” “绝大多数初创公司旨在为现有技术寻找新的应用;通常,没有一个新的应用程序或网站或什至新的机器人技术“垂直”真正突破技术界限。但是我们确实确实发明了一些新东西,而这种优势和能量才是驱动我们的动力。所有这些对我来说都是非常的麻省理工学院。













-

买这个rakesh jhunjhunwala库存与航空公司一起飞翔
2021-08-13
-
江苏炜耀医疗科技有限公司“无证生产医用防护口罩 、虚假标注生产日期” 被处罚款28万元
2021-08-13
-

你错过了这些IPO中的任何一个顶级共同资金射杀了inoctober吗?
2021-08-13
-

印度河大厦因增长担忧跌至逾8个月低点
2021-08-13
-

-
美光科技股票周四下跌
2021-08-13
-

美元萎缩2个月低与日元,美国税计划infocus
2021-08-13
-

【小康圆梦】高平:小小油葵撬动大产业带领群众走向致富路
2021-08-13
-

全球连线丨面具后的美国
2021-08-13

- 1 [商业热点]Infosys挑选Salil Parekh作为首席执行官和MD被尝试并测试了移动;过渡应该快速:JMFinancial.
- 2 [商业热点]监管机构在美国国债上看闪耀更多亮点
- 3 [商业热点]澳优2021年上半年营收42.71亿元 羊奶粉业务恢复加速
- 1 [时事评论]您的番茄迷信设置为钱包重量;这是为什么
- 2 [创业商讯]绿键交易达到历史新高达到了1000亿美元
- 3 [环球要闻]Maha Agri董事会将207英亩发展进出口发展
- 4 [股票基金]Rajesh出口股票,艾草电机,Sun Pharma,JP Associates,塔塔全球饮料,Cofustoday的依赖资本
- 5 [财经资讯]Airtel库存,HDFC标准人寿保险,Focustoday的喷气式飞机
- 6 [商业热点]Infosys挑选Salil Parekh作为首席执行官和MD被尝试并测试了移动;过渡应该快速:JMFinancial.
- 7 [经济报道]Reliance Industries在Usyield上的135个BPS价格为美元债券










Copyright © 2021 山西商业网 All Rights Reserved