控制高度灵活工具的机器人
您如何计算两个机械臂的协调运动,以便它们可以精确地引导高度灵活的工具?ETH研究人员已将优化计算的所有方面集成到算法中。除其他事项外,热线切割机还将用于开发无灰浆结构的构件。
新生儿的手臂和手大都以无方向的随机方式运动。它必须学习如何逐步协调它们。需要多年的练习才能掌握小提琴手或书法家的精细平衡动作。因此,不足为奇的是,两个机器人手臂用于引导工具的最佳运动的高级计算正好涉及极具挑战性的优化任务。当工具本身不是刚性的,而是在所有方向上都具有柔性,并且根据其位置和运动而不同地弯曲时,复杂性也会大大增加。
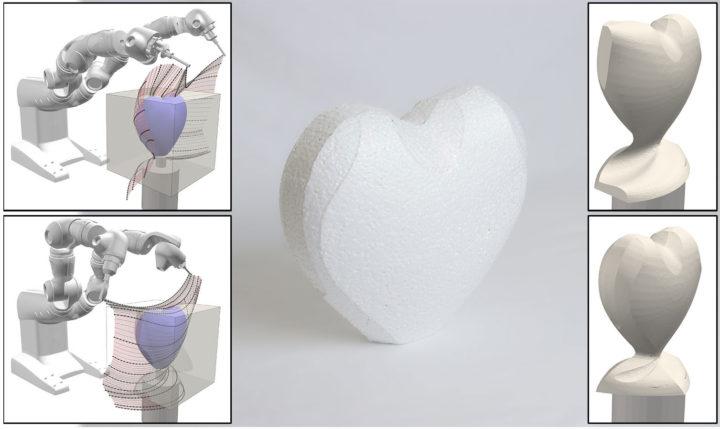
智能互动系统研究所 Stelian Coros研究小组的SimonDünser 与其他研究人员合作开发了一种热线切割机器人,该机器人具有在工作时可以灵活弯曲的电线。与以前的系统相比,这使它可以用更少的切口创建更复杂的形状,在以前的系统中,电热丝是刚性的,因此只能从易熔塑料的直角线上切出直角表面。
雕刻兔子和设计立面
相比之下,来自ETH计算机科学家的RoboCut不仅限于平面,圆柱体,圆锥体或鞍形表面,还能够在塑料块中创建凹槽。但是,最大的优点是,与必须使用直纹曲面来近似目标形状的情况相比,目标线的弯曲意味着所需的切割少得多。结果,可弯曲的线材可用于由聚苯乙烯砌块通过仅十个类似木雕精度的切口来创建坐姿兔子的形象。只需剪两下,兔子的轮廓便清晰可见。
除了对传统热线方法的根本改进之外,RoboCut项目还考虑了其他特定的应用目标。例如,将来该技术可用于建筑领域,以生产用于混凝土零件的单个聚苯乙烯模具。这将使外观设计更加多样化,并开发出新型的模块化建筑系统。
对于邓瑟来说,科学挑战是该项目的重点。RoboCut的特殊之处在于复杂的优化计算。需要这些工具来找到可能的最有效工具路径,同时尽可能精确地熔化聚苯乙烯嵌段中的所需形状。科学家解释说。
为了以受控方式移动导线,将其连接到ABB的两臂Yumi机器人上。首先,必须计算导线对机器人手臂运动的反应。通过模拟确定会导致不稳定的电线放置或存在电线断裂风险的位置,然后将其消除。
然后,ETH研究人员便可以在此基础上进行实际的优化。这必须同时考虑三个相关方面。在物理层面上,预测导线的受控弯曲和移动以执行所需的切割非常重要。就形状而言,必须确定一个切割顺序,该顺序将以尽可能少的步骤实现表面到目标形状的高精度逼近。最后,必须排除与机器人零件或其环境的碰撞以及意外割伤。
防止极小值
Dünser是成功将这项复杂任务中的所有参数集成到全局优化算法中的第一批科学家之一。为此,他设计了一种基于主要目标的结构化方法,即电线应始终尽可能切近目标物体的表面。然后,将所有其他限制分配给成本,然后对这些限制进行总体优化。
但是,如果没有其他设备,此类计算将始终处于局部最小值,这将导致毫无意义的最终结果。为避免这种情况,可以说,邓瑟首先消除了成本函数,并从最初仅大致适合目标形状的切口开始计算。然后将切削模拟逐渐逼近目标形状,直到达到所需的精度为止。
具有多种潜力的方法
邓瑟(Dünser)开发的方法不仅限于热丝切割。其他切削和铣削技术的刀具路径设计将来也会从中受益。该方法为仿真创造了更大的范围,特别是在生成复杂的非旋转对称形状时。
借助该技术可以通过火花消融技术高精度切割导电材料,从而可以从中受益。将来,这可能涉及可弯曲的电极线。这意味着-与塑料的热线切割一样-与当今的硬线相比,更容易进行切割,从而更有效地进行切割。
RoboCut的一个特定应用正在与洛桑EPF的一个研究小组共同计划。在大型版本的热线切割机器人的帮助下,将开发用于不含灰浆和紧固技术的建筑结构的系统构建块。元素本身必须以稳定的方式结合在一起。将来,还应该使用机器人切割聚苯乙烯模具,然后用这些模具将各种砖块浇铸到混凝土中。巧妙的塑料切割机也因此创造了明天的混凝土施工技术。













-

买这个rakesh jhunjhunwala库存与航空公司一起飞翔
2021-08-13
-
江苏炜耀医疗科技有限公司“无证生产医用防护口罩 、虚假标注生产日期” 被处罚款28万元
2021-08-13
-

你错过了这些IPO中的任何一个顶级共同资金射杀了inoctober吗?
2021-08-13
-

印度河大厦因增长担忧跌至逾8个月低点
2021-08-13
-

-
美光科技股票周四下跌
2021-08-13
-

美元萎缩2个月低与日元,美国税计划infocus
2021-08-13
-

【小康圆梦】高平:小小油葵撬动大产业带领群众走向致富路
2021-08-13
-

全球连线丨面具后的美国
2021-08-13

- 1 [商业热点]Infosys挑选Salil Parekh作为首席执行官和MD被尝试并测试了移动;过渡应该快速:JMFinancial.
- 2 [商业热点]监管机构在美国国债上看闪耀更多亮点
- 3 [商业热点]澳优2021年上半年营收42.71亿元 羊奶粉业务恢复加速
- 1 [时事评论]您的番茄迷信设置为钱包重量;这是为什么
- 2 [创业商讯]绿键交易达到历史新高达到了1000亿美元
- 3 [环球要闻]Maha Agri董事会将207英亩发展进出口发展
- 4 [股票基金]Rajesh出口股票,艾草电机,Sun Pharma,JP Associates,塔塔全球饮料,Cofustoday的依赖资本
- 5 [财经资讯]Airtel库存,HDFC标准人寿保险,Focustoday的喷气式飞机
- 6 [商业热点]Infosys挑选Salil Parekh作为首席执行官和MD被尝试并测试了移动;过渡应该快速:JMFinancial.
- 7 [经济报道]Reliance Industries在Usyield上的135个BPS价格为美元债券










Copyright © 2021 山西商业网 All Rights Reserved